The knowledge base for intelligent machines and systems
TypeDB gives robotic systems a structured world model that represents objects, relationships, and constraints directly. It enables reasoning across perception, planning, and control, helping robots act safely and intelligently in complex environments.
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
match
$user isa full-time-employee;
fetch {
"employee": { $user.* }
};
[{
"employee": {
"type": { "root": "entity", "label": "full-time-employee" },
"attribute": [
{ "value": "Chloé Dupond", "value_type": "string", "type": { "root": "attribute", "label": "full-name" } },
{ "value": "chloe@typedb.com", "value_type": "string", "type": { "root": "attribute", "label": "email" } },
{ "value": 185, "value_type": "long", "type": { "root": "attribute", "label": "employee-id" } },
{ "value": 35, "value_type": "long", "type": { "root": "attribute", "label": "weekly-hours" } }
]
}
}]
Why TypeDB is so strong in robotics
Robotics data is contextual by nature. A robot’s understanding of the world depends on what things are, where they are, and how they interact. But most systems store this data in fragments such as ROS messages, parameter servers, JSON configs, or ad-hoc SQL tables.
TypeDB provides an intelligent robotics system that can interact with, and more importantly, react to the world around it, and make decisions based on those insights.
Semantic grounding
Represent the world as entities and relationships as opposed to point clouds and variables.
Task reasoning
Model actions, dependencies, and goals with constraints that mirror real-world logic.
Safety and explainability
Enforce consistency across changing environments, so a robot never acts on invalid assumptions.
Related articles

Model the world precisely
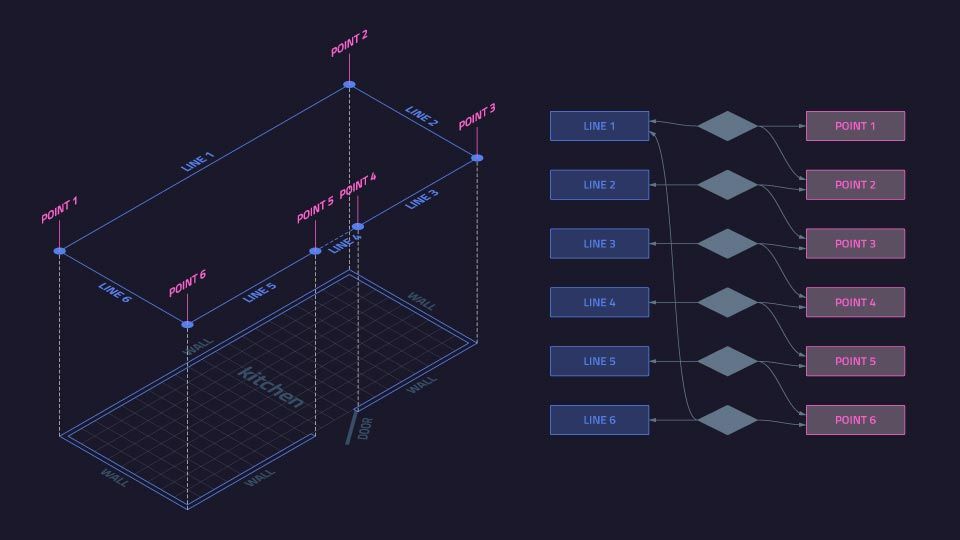
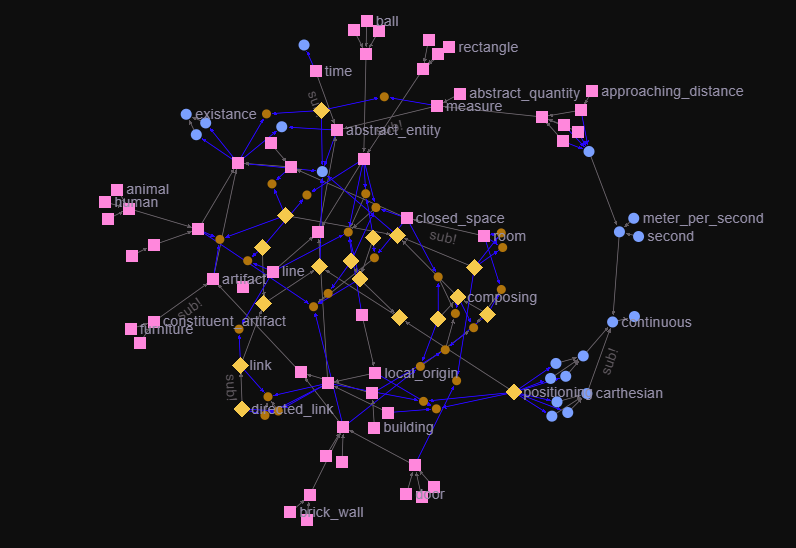
TypeDB stores entities like objects, locations, agents, and tasks as semantically defined types. Instead of encoding the world as numeric arrays or hard-coded maps, you define it as a structured graph of relationships.
- Represent spatial, functional, and ownership relationships.
- Encode changing state (grasped-by, located-in, powered-by) as roles and relations.
- Maintain consistency as the world evolves through roles and constraints defined in the schema.
Value: Every subsystem, from perception to planning and control, queries the same world model.
Reason about goals dependencies
Planning isn’t just pathfinding; it’s logical reasoning about what must be true before action. TypeDB’s inference engine allows robots to:
- Chain operations using custom functions (“I can only grasp an object if it’s reachable and unoccupied”).
- Encode hierarchical task plans and infer blocked or completed dependencies.
- Generate explanations for failures or alternate plans.
TypeDB answers logically, using schema constraints and inference. Value: Robots plan with understanding, not just coordinates.
Note, we recently shared a paper from the University of DELFT proposing the ROSA model, built on TypeDB.
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
match
$campaign isa campaign, has name like "Salt Typhoon";
indicates($indicator, $campaign);
$indicator has confidence $confidence;
sort $confidence;
fetch {
"indicator": $indicator.name,
"description": $indicator.description
};Ensure true auditability and oversight
TypeDB doesn’t replace your ML or SLAM systems, but it does give them meaning. Perception outputs (detections, 3D positions, labels) feed into TypeDB, where relationships and constraints give those data points context.
- Link detections to known objects and locations.
- Track entity state changes across time and events.
- Propagate updates through the reasoning layer for dynamic awareness.
Value: From perception data to semantic understanding in real time.